- Aim: To make a Password Security System using ATmega16 microcontroller, LCD (16x2), Keypad (4x3) and motor.
- Code:
#define F_CPU 8000000UL
#include<avr/io.h>
#include<util/delay.h>
void initialize();
void lcd_cmd(char value);
void lcd_data(char value);
void lcd_string(char *str);
void lcd_num(unsigned int number);
void motor();
void initialize()
{
lcd_cmd(0x01); //clear LCD
lcd_cmd(0x02); //home position
lcd_cmd(0x06); //L-R
//lcd_cmd(0x04);
lcd_cmd(0x28); //4 bit mode
lcd_cmd(0x0C); //character generation
}
void lcd_cmd(char value)
{
int un,ln; // pc7-pc4 = un ; pc3-pc4 =ln
un=value&0xF0; // & is anding function
PORTC=0x04|un;
_delay_ms(2);
PORTC=0x00|un;
_delay_ms(2);
ln=(value<<4)&0xF0; //<<=left shif by 4 bits
_delay_ms(2);
PORTC=0x04|ln;
_delay_ms(2);
PORTC=0x00|ln;
}
void lcd_data(char value)
{
int un,ln; // pc7-pc4 = un ; pc3-pc4 =ln
un=value&0xF0; // & is anding function
PORTC=0x05|un;
_delay_ms(2);
PORTC=0x01|un;
_delay_ms(2);
ln=(value<<4)&0xF0; //<<=left shif by 4 bits
_delay_ms(2);
PORTC=0x05|ln;
_delay_ms(2);
PORTC=0x01|ln;
}
void lcd_string(char *str)
{
int i=0;
while(str[i]!='\0')
{
lcd_data(str[i]);
i++;
}
}
void lcd_num(unsigned int number)
{
lcd_cmd(0x04);
int d=0;
while(number!=0)
{
d=number%10;
lcd_data(d+48);
number=number/10;
}
}
void motor(){
DDRA=0xFF;
PORTA=0xFE;
}
int pass=1234;
int ar[4];
void main()
{
DDRC=0xFF;
initialize();
int i=0;
DDRD=0x00;
DDRB=0xFF;
lcd_cmd(0xC0);
lcd_string("Enter Password");
while(1)
{
PORTD=0x0F;
PORTB=0x06;
if(PIND==0x0E)
{
lcd_cmd(0x80+i);
lcd_string("1");
_delay_ms(200);
ar[i]=1;
i++;
}
else if(PIND==0x0D){
lcd_cmd(0x80+i);
lcd_string("4");
_delay_ms(200);
ar[i]=4;
i++;
}
else if(PIND==0x0B){
lcd_cmd(0x80+i);
lcd_string("7");
_delay_ms(200);
ar[i]=7;
i++;
}
else if(PIND==0x07){
lcd_cmd(0x80+i);
lcd_string("*");
_delay_ms(200);
ar[i]=11;
i++;
}
PORTD=0x0F;
PORTB=0x05;
if(PIND==0x0E){
lcd_cmd(0x80+i);
lcd_string("2");
_delay_ms(200);
ar[i]=2;
i++;
}
else if(PIND==0x0D){
lcd_cmd(0x80+i);
lcd_string("5");
_delay_ms(200);
i++;
}
else if(PIND==0x0B){
lcd_cmd(0x80+i);
lcd_string("8");
_delay_ms(200);
ar[i]=8;
i++;
}
else if(PIND==0x07){
lcd_cmd(0x80+i);
lcd_string("0");
_delay_ms(200);
ar[i]=0;
i++;}
PORTD=0x0F;
PORTB=0x03;
if(PIND==0x0E){
lcd_cmd(0x80+i);
lcd_string("3");
_delay_ms(200);
ar[i]=3;
i++;
}
else if(PIND==0x0D){
lcd_cmd(0x80+i);
lcd_string("6");
_delay_ms(200);
ar[i]=6;
i++;
}
else if(PIND==0x0B){
lcd_cmd(0x80+i);
lcd_string("9");
_delay_ms(200);
ar[i]=9;
i++;
}
else if(PIND==0x07){
if(ar[0]==1 && ar[1] ==2 && ar[2]==3 && ar[3]==4){
lcd_data(0x00);
lcd_cmd(0xC0);
lcd_string("password correct");
motor();
}
else {
lcd_cmd(0xC0);
lcd_string("Pass incorrect");
}
}
}
}
#include<avr/io.h>
#include<util/delay.h>
void initialize();
void lcd_cmd(char value);
void lcd_data(char value);
void lcd_string(char *str);
void lcd_num(unsigned int number);
void motor();
void initialize()
{
lcd_cmd(0x01); //clear LCD
lcd_cmd(0x02); //home position
lcd_cmd(0x06); //L-R
//lcd_cmd(0x04);
lcd_cmd(0x28); //4 bit mode
lcd_cmd(0x0C); //character generation
}
void lcd_cmd(char value)
{
int un,ln; // pc7-pc4 = un ; pc3-pc4 =ln
un=value&0xF0; // & is anding function
PORTC=0x04|un;
_delay_ms(2);
PORTC=0x00|un;
_delay_ms(2);
ln=(value<<4)&0xF0; //<<=left shif by 4 bits
_delay_ms(2);
PORTC=0x04|ln;
_delay_ms(2);
PORTC=0x00|ln;
}
void lcd_data(char value)
{
int un,ln; // pc7-pc4 = un ; pc3-pc4 =ln
un=value&0xF0; // & is anding function
PORTC=0x05|un;
_delay_ms(2);
PORTC=0x01|un;
_delay_ms(2);
ln=(value<<4)&0xF0; //<<=left shif by 4 bits
_delay_ms(2);
PORTC=0x05|ln;
_delay_ms(2);
PORTC=0x01|ln;
}
void lcd_string(char *str)
{
int i=0;
while(str[i]!='\0')
{
lcd_data(str[i]);
i++;
}
}
void lcd_num(unsigned int number)
{
lcd_cmd(0x04);
int d=0;
while(number!=0)
{
d=number%10;
lcd_data(d+48);
number=number/10;
}
}
void motor(){
DDRA=0xFF;
PORTA=0xFE;
}
int pass=1234;
int ar[4];
void main()
{
DDRC=0xFF;
initialize();
int i=0;
DDRD=0x00;
DDRB=0xFF;
lcd_cmd(0xC0);
lcd_string("Enter Password");
while(1)
{
PORTD=0x0F;
PORTB=0x06;
if(PIND==0x0E)
{
lcd_cmd(0x80+i);
lcd_string("1");
_delay_ms(200);
ar[i]=1;
i++;
}
else if(PIND==0x0D){
lcd_cmd(0x80+i);
lcd_string("4");
_delay_ms(200);
ar[i]=4;
i++;
}
else if(PIND==0x0B){
lcd_cmd(0x80+i);
lcd_string("7");
_delay_ms(200);
ar[i]=7;
i++;
}
else if(PIND==0x07){
lcd_cmd(0x80+i);
lcd_string("*");
_delay_ms(200);
ar[i]=11;
i++;
}
PORTD=0x0F;
PORTB=0x05;
if(PIND==0x0E){
lcd_cmd(0x80+i);
lcd_string("2");
_delay_ms(200);
ar[i]=2;
i++;
}
else if(PIND==0x0D){
lcd_cmd(0x80+i);
lcd_string("5");
_delay_ms(200);
i++;
}
else if(PIND==0x0B){
lcd_cmd(0x80+i);
lcd_string("8");
_delay_ms(200);
ar[i]=8;
i++;
}
else if(PIND==0x07){
lcd_cmd(0x80+i);
lcd_string("0");
_delay_ms(200);
ar[i]=0;
i++;}
PORTD=0x0F;
PORTB=0x03;
if(PIND==0x0E){
lcd_cmd(0x80+i);
lcd_string("3");
_delay_ms(200);
ar[i]=3;
i++;
}
else if(PIND==0x0D){
lcd_cmd(0x80+i);
lcd_string("6");
_delay_ms(200);
ar[i]=6;
i++;
}
else if(PIND==0x0B){
lcd_cmd(0x80+i);
lcd_string("9");
_delay_ms(200);
ar[i]=9;
i++;
}
else if(PIND==0x07){
if(ar[0]==1 && ar[1] ==2 && ar[2]==3 && ar[3]==4){
lcd_data(0x00);
lcd_cmd(0xC0);
lcd_string("password correct");
motor();
}
else {
lcd_cmd(0xC0);
lcd_string("Pass incorrect");
}
}
}
}
- Hardware information:
PortC = LCD display
Port A= Motor
Password set: 1234
- Proteus Simulation:
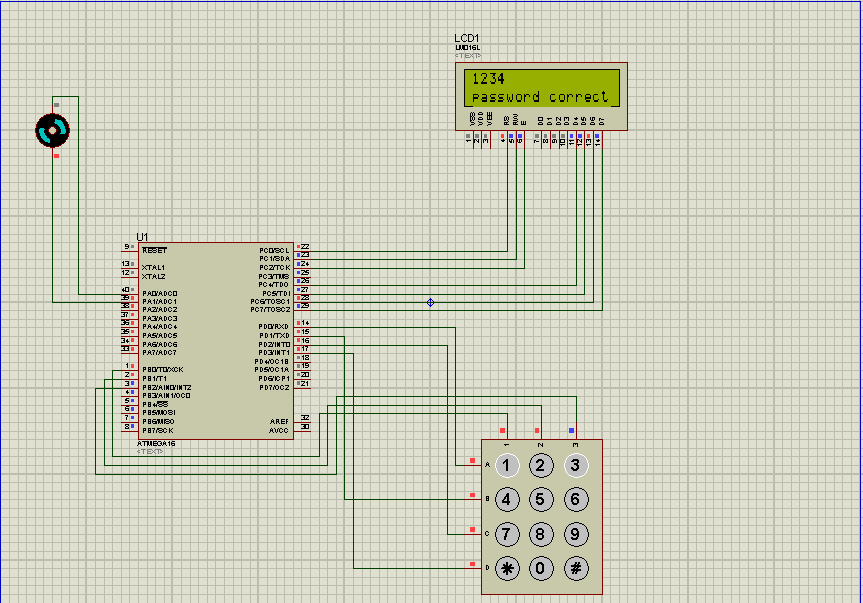 |
| Password security Simulation |
- Constraints:
1) To reset, Close the program and the restart.
2)Motor needs external Power
3) Password can't be reset externally
3) Password can't be reset externally
- Conclusion:
Comments
Post a Comment